I’m trying to answer a radio transmitter programming question. I’m familiar with R/C systems from flying R/C aircraft when I was a kid, but we never really flew anything that was complicated enough to need a programmable transmitter. For the Streetliner R/C prototype I’m working on right now, I have sort of a unique control challenge I’m not sure how to solve.
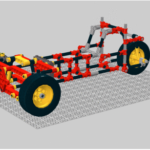
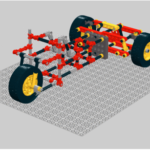
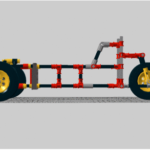
I plan to include a tilt lock system on the R/C prototype (RCP) similar in function to the tilt lock mechanism I have planned for the full size vehicle. That is, an on-demand way to lock the front suspension tilt and keep the body from being able to lean. This for low-speed maneuvering, stop lights, and parking. The R/C mechanics of this are simple enough — just dedicate a servo to push in a pin or some other mechanical stop. The problem is, because this is a free-tilting vehicle that will turn via counter-steering, once I lock the tilt, my left/right control will actually be reversed (since you turn left to lean right on a motorcycle or similar single-track vehicle like this). By locking the tilt, I’ve returned to conventional steering.
So what I’m trying to figure out is if that’s something I can program. Can I set up my radio transmitter such that when I flip a switch, the tilt lock servo actuates whatever it actuates AND the steering input reverses? In a way, I suppose it’s similar to the pitch control reversal on the “inverted mode” switch for an R/C helicopter (which I’ve just realized that I have one of those just laying around! Insert maniacal laugh! Bwahahaha). Trouble is, that’s on the pitch axis, not the roll axis and that inversion does not also push a servo to do anything. It also reverses the blade pitch, which isn’t quite what I’m after either. Or would that work?
Frak.
Any ideas, internet? Anybody program a radio lately?